Robots¶
The toolkit allows you to add various robots to your training environment. Here are presented the implemented robots. You can also add custom robot by placing its model and URDF file into envs/robots directory. For details about how myGym works with robots in the simulation, see Robot.
Robot |
Type |
Gripper |
DOF |
Parameter value |
|---|---|---|---|---|
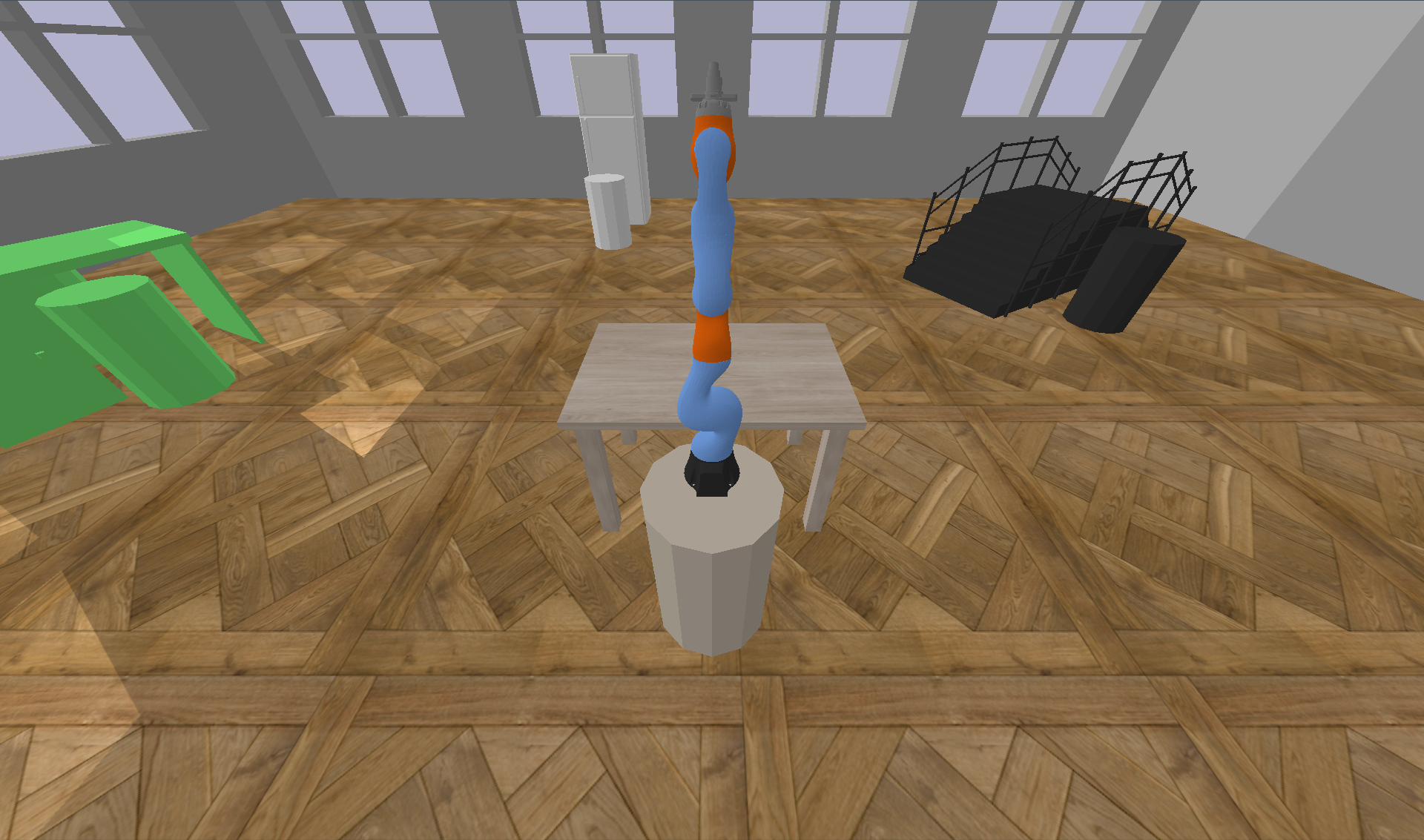
Kuka IIWA |
arm |
magnetic |
7 |
kuka |
Franka-Emica |
arm |
two finger |
6 |
panda |
Jaco arm |
arm |
two finger |
6 |
jaco |
UR-3 |
arm |
tactile gripper |
6 |
ur3 |
UR-5 |
arm |
tactile gripper |
6 |
ur5 |
UR-10 |
arm |
tactile gripper |
6 |
ur10 |
Gummiarm |
arm |
passive palm |
6 |
gummi |
Reachy |
arm |
passive palm |
8 |
reachy |
Leachy |
arm |
passive palm |
8 |
leachy |
ReachyLeachy |
dualarm |
passive palms |
16 |
reachy_and_leachy |
ABB Yumi |
dualarm |
two finger |
24 |
yummi |
Pepper |
humanoid |
– |
– |
– |
Thiago |
humanoid |
– |
– |
– |
Atlas |
humanoid |
– |
– |
– |
KUKA LBR iiwa¶
FRANKA EMICA Panda¶

KINOVA JACO¶

GummiFactory GummiArm¶
Universal Robots UR3¶

Universal Robots UR5¶

Universal Robots UR10¶

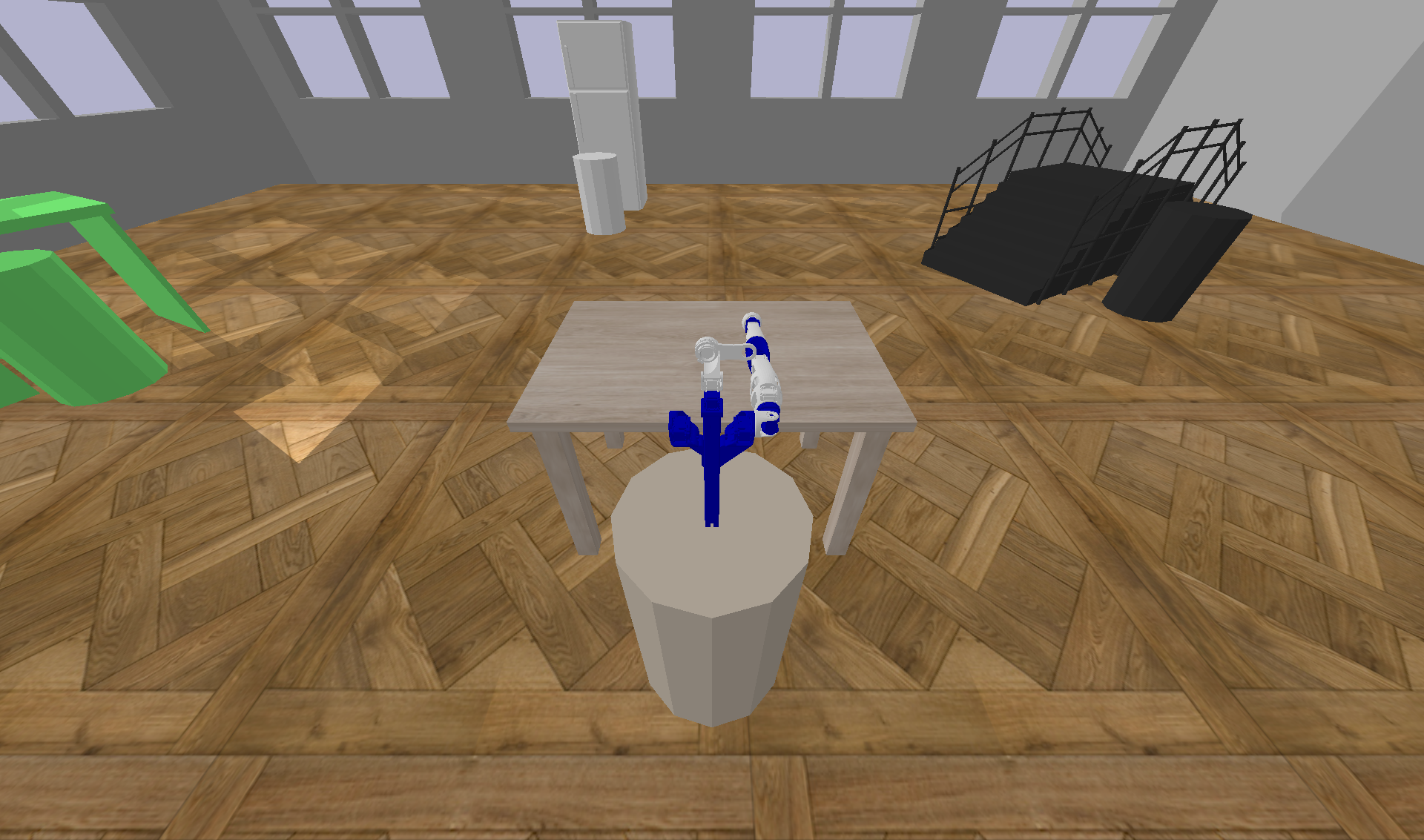
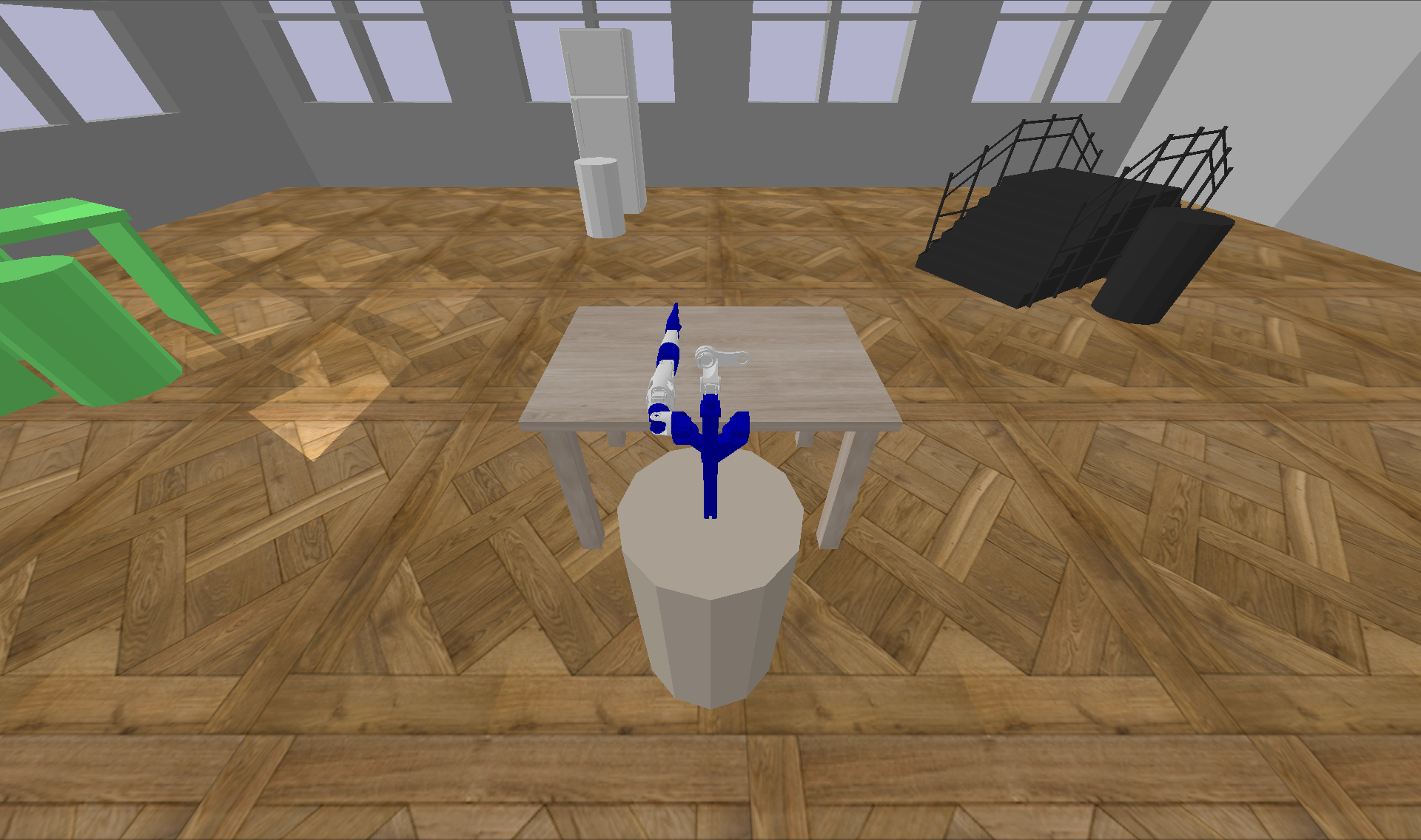

ABB YuMi¶
