Workspaces¶
The environment setup is adjusted based on selected workspace. The origin of coordinate frame is always placed at the center of the top face of the robot’s stand, the positive x-axis points right from the robot, the positive y-axis points to the front from the robot. At each workspace, 5 cameras are initialized, watching the scene from the back, front, left, right and top.
Name |
Type |
Suitable tasks |
Parameter value |
|---|---|---|---|
Tabledesk |
manipulation |
Reach, Push, Pick, Place, PicknPlace |
table |
Drawer |
manipulation |
Reach, Pick, PicknPlace |
drawer |
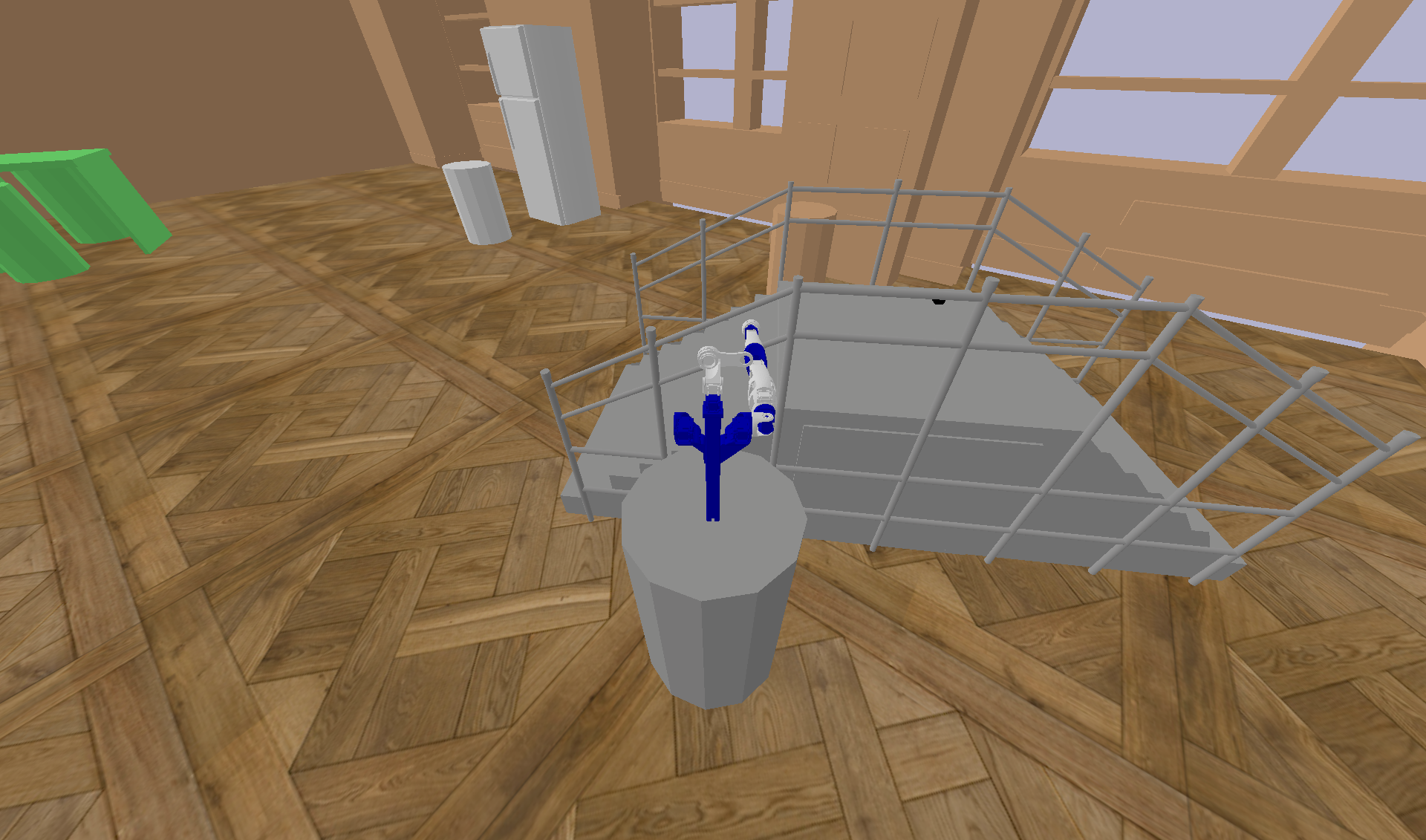
Fridge |
manipulation |
Reach,Push, Open, Close, Pick |
fridge |
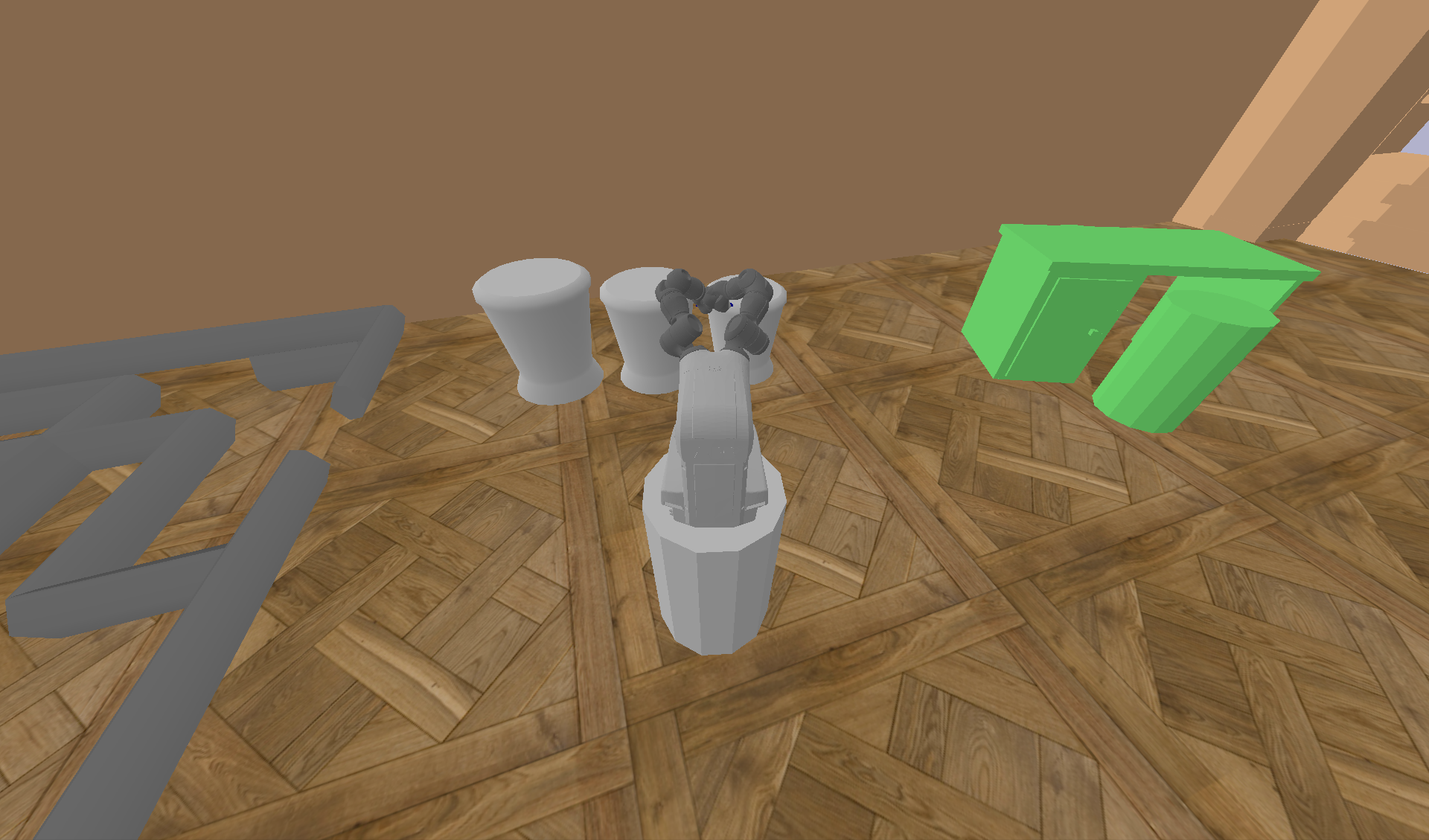
Baskets |
manipulation |
Throw, Hit |
baskets |
Darts |
manipulation |
Throw, Hit |
darts |
Football |
manipulation |
Throw, Hit |
football |
Collaborative table |
collaboration |
Give, Hold, Move together |
collabtable |
Vertical maze |
planning |
– |
veticalmaze |
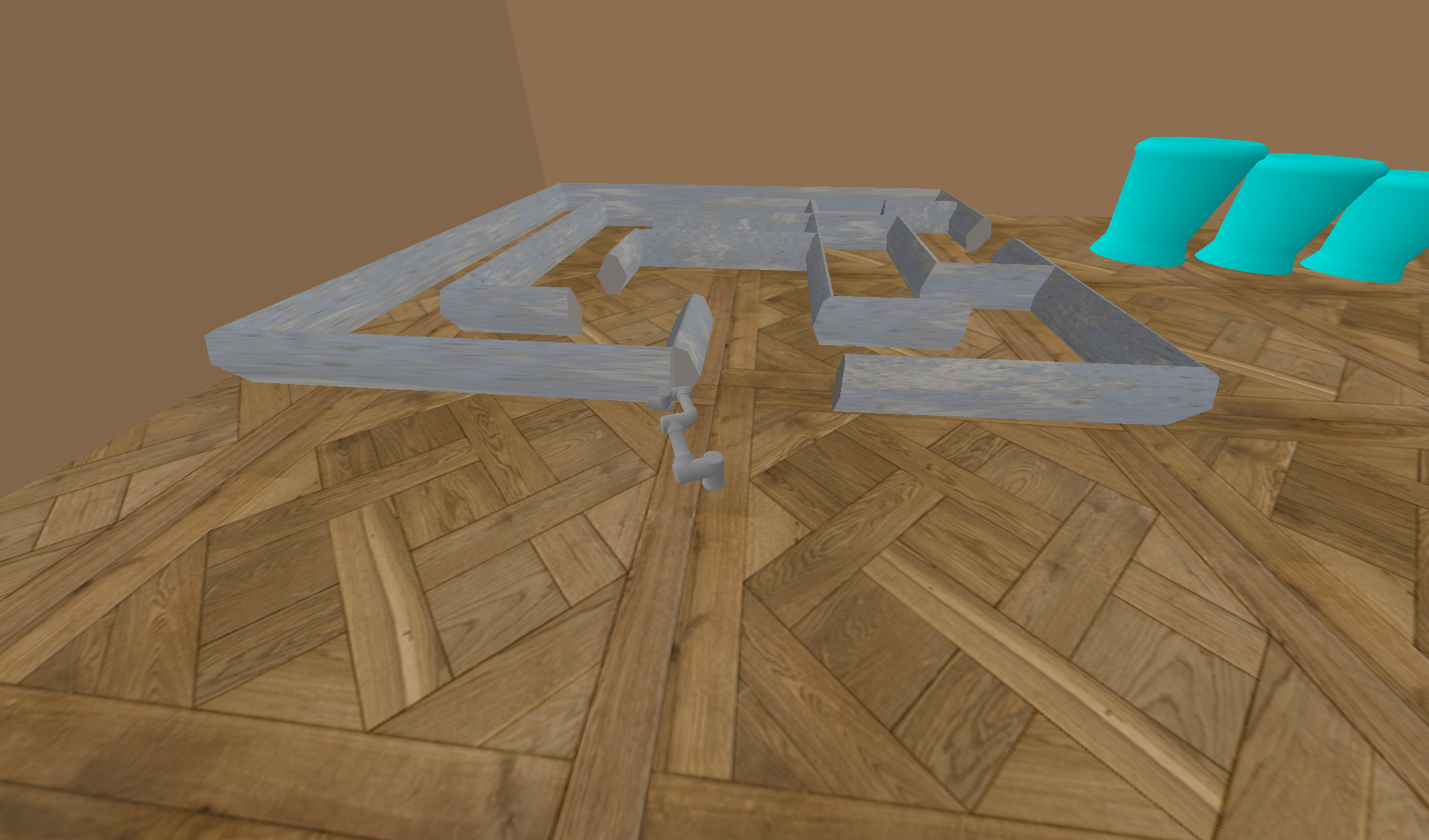
Maze |
navigation |
– |
maze |
Stairs |
navigation |
– |
stairs |
Baskets¶
Collabtable¶

Darts¶
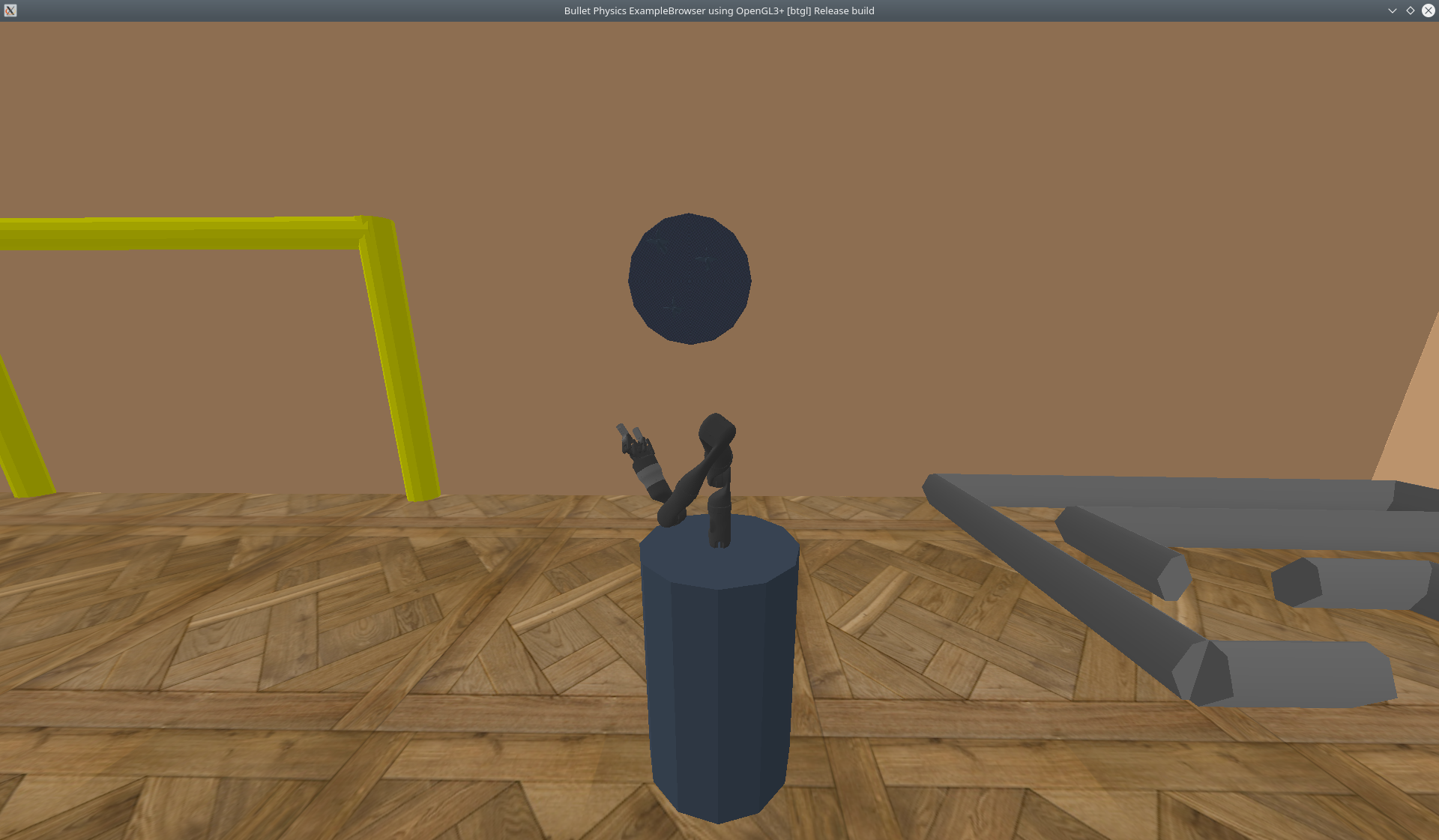
Football¶

Fridge¶

Maze¶
Stairs¶
Table¶

Verticalmaze¶
