Welcome to myGym’s documentation!¶
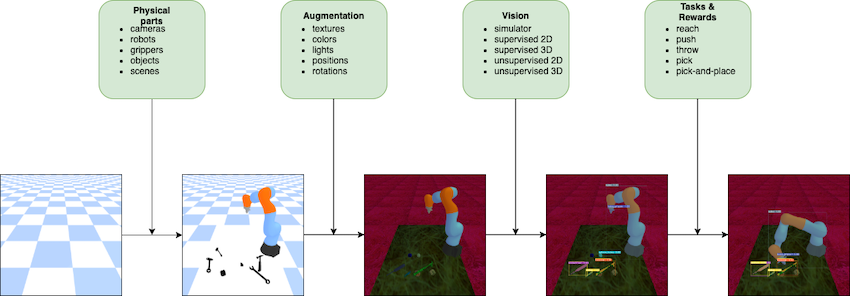
We introduce myGym, a toolkit suitable for fast prototyping of neural networks in the area of robotic manipulation and navigation. Our toolbox is fully modular, so you can train your network to control different robots in several envinronments defined parametrically. You can also create curicullum of tasks and test your network set of tasks with inreasing complexity. There is automatic evaluation and benchmark tool for your network. We pretrained the neural networks for visual recognition of all objects in the simulator. We constantly train networks to provide baselines for the tasks in the toolbox. The training is 50x faster with the visualization turned on than realtime simulations.
Note
Mygym is now under construction
Overview¶
Environment |
Gym-v0 is suitable for manipulation, navigation and planning tasks |
|---|---|
Workspaces |
Tabledesk, Collaborative table, Maze, Vertical maze, Drawer, Darts, Football, Fridge, Stairs, Baskets |
Vision |
Cartesians, RGB, Depth, Class, Centroid, Bounding Box, Semantic Mask, Latent vector |
Robots |
7 robotic arms, 2 dualarms, humanoid |
Robot actions |
Absolute, Relative, Joints |
Objects |
54 objects in 5 categories |
Tasks |
Reach, Push, Pick, Place, PicknPlace, Throw, Hit, Catch, Navigate |
Randomizers |
Light, Texture, Size, Camera position |
Baselines |
Tensorflow, Pytorch |
Modular Structure¶
We developed fully modular toolbox where user can easily combine the predefined elements into custom envinronment. There are specific modules for each component of the simulation. User can easily modify and add custom modules.
How to
How to - advanced
Baselines
Citing myGym¶
@misc{myGym,
author = {},
title = {myGym},
year = {2020},
publisher = {GitHub},
journal = {GitHub repository},
howpublished = {},
}
Authors¶
Core team:
Michal Vavrecka, Gabriela Sejnova, Megi Mejdrechova, Nikita Sokovnin
Contributors:
Radoslav Skoviera, Peter Basar, Vojtech Pospisil, Jiri Kulisek, Anastasia Ostapenko, Sara Thu Nguyen